它擁有人類的雙足,可以實現像人類一樣行走,機器人采取了使用模擬舵機代替人類關節,實現機器人的步態設計控制,使用舵機控制芯片控制各個關節的動作,從而實現了對步伐的大小、快慢、幅度的控制,這就是雙足機器人。

一直以來,雙足機器人的研發主要是形態上的“仿生”,也就是說要讓機器人的行走能夠像人一樣,無論是下半身都有十余個驅動“關節”,以控制各種方向的力量,可驅動“關節”一多,力量和平衡有了,能耗也高了。
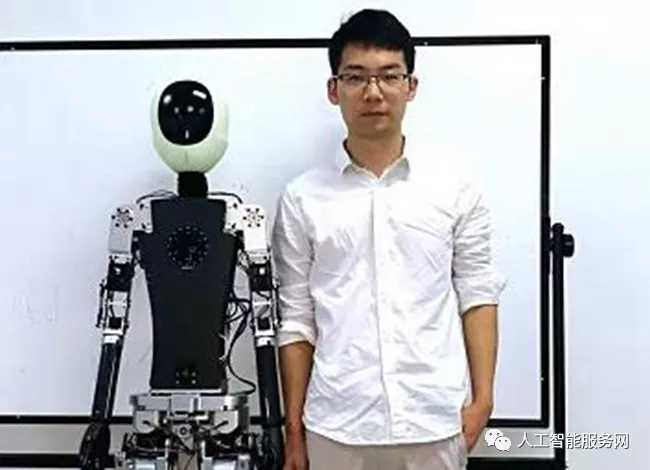
近日,深圳市行者機器人技術有限公司研發了一款小貝機器人,該機器人利用深度強化學習、遷移學習、連續學習等一系列人工智能技術,讓機器人通過2D、3D的逐步訓練,像孩童學步一樣,慢慢掌握走路技巧。

別小看了這款機器人,雖然它的框架非常復雜,尤其是系統方面,但是小貝機器人要“長高”“長大”,難度技術是幾何倍數增加的,“為人類帶來更多安全、有效服務”的目標始終堅持,因為這才是機器人研究的最終目的。
關鍵詞: